Trash Tiger was my team’s submission to the Waterloo Engineering Competition’s Senior Category in 2023.
We had 6 hours to make a robot that could navigate an obstacle course and pick up metallic balls (“trash”), with a limited budget.
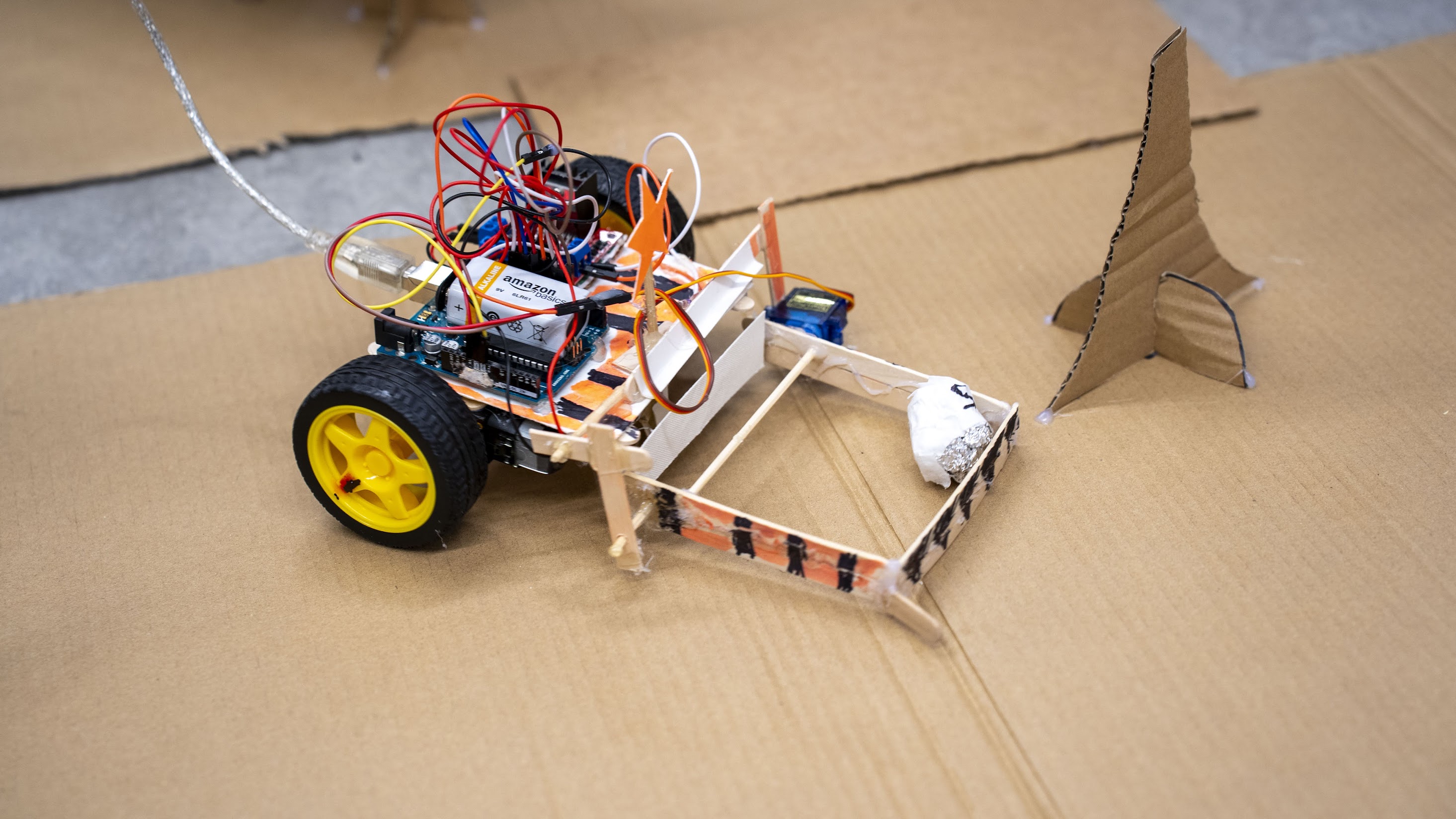
We drafted up many designs at the start, but settled on a Wall-E like robot with a pivoting arm. Everything was built from scratch with popsicle sticks, paper plates and a lot of hot glue. The robot had two DC motors on it to drive, and was controlled using a laptop’s keyboard and a serial connection over USB.
We’re stoked that we won second place overall (despite us all being first years)! So many other teams also made amazing robots, and it was overall a great experience, being my first time at an engineering competition.
The code for the Arduino and computer’s controller interface can be found on GitHub. It’s really nothing too sophisticated and not my best work, but it totally got the job done in the tight timeframe.
Back